






















































Hardware and software requirements
Let's first see what we need in this chapter to get started. Apart from the Galileo board, the most important piece of hardware here is the robot chassis. I used a simple DFRobot MiniQ 2 wheels chassis for this chapter. Here is an image of this chassis that comes with a base, two motors, and two wheels:

In the preceding image, you can see the ultrasonic sensor that was already mounted. Of course, you can use other robot chassis' for this chapter; they simply need to have two wheels with two motors, and you should be able to mount the Galileo board on it.
Then, we need an Arduino motor shield to connect the two DC motors. I used a DFRobot motor shield for this task. Note that I also used a prototyping for this project, but this is only necessary if you want to mount more sensors in the future.
We also need an ultrasonic sensor. I used an URM-37 sensor in this project, which is quite convenient to use:
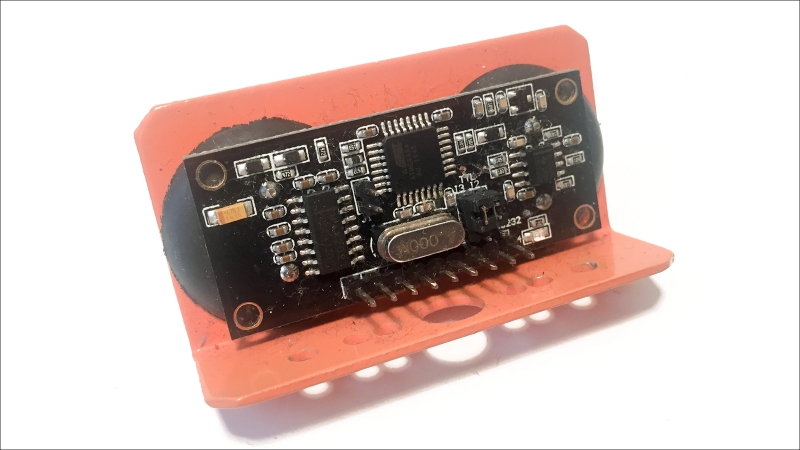
Finally, you will need a battery to power the robot while...





