





















































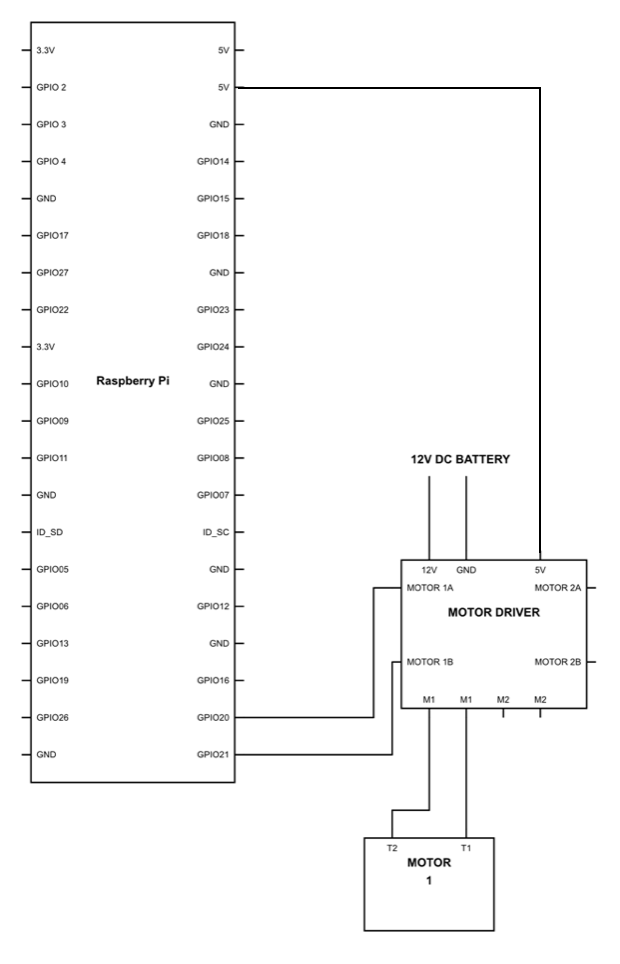
OK, that's a lot of theory, so now let's fire up one of our motors via Raspberry Pi. To do that, go ahead and connect the motor and the motor driver as shown:
Now, once you are done with it, let's upload the code and see what happens:
import RPi.GPIO as GPIO
from time import sleep
GPIO.setmode(GPIO.BCM)
Motor1R = 20
Motor1L = 21
GPIO.setup(Motor1R,GPIO.OUT)
GPIO.setup(Motor1L,GPIO.OUT)
GPIO.output(Motor1R,GPIO.HIGH)
GPIO.output(Motor1L,GPIO.LOW)
sleep(5)
GPIO.output(Motor1R,GPIO.LOW)
GPIO.output(Motor1L,GPIO.HIGH)
sleep(5)
GPIO.cleanup()
Now, let's understand the code a bit:
Motor1R = 20
Motor1L = 21
Pin number 20 is connected to IN 1 of the motor driver. For convenience, we have changed motor 1 right to Motor1R; in reality, the motor can spin in any direction but we have just written this for convenience and understanding. Similarly, we have...








