






















































The most fun robots can be those built by amateur robot builders. This is an extremely innovative space.
Robotics always had a home in education, with academic builders using them for learning and experimentation platforms. Many commercial ventures have started in this setting. University robots tend to be group efforts, with access to increasingly hi-tech academic equipment to create them, as shown in the following picture:
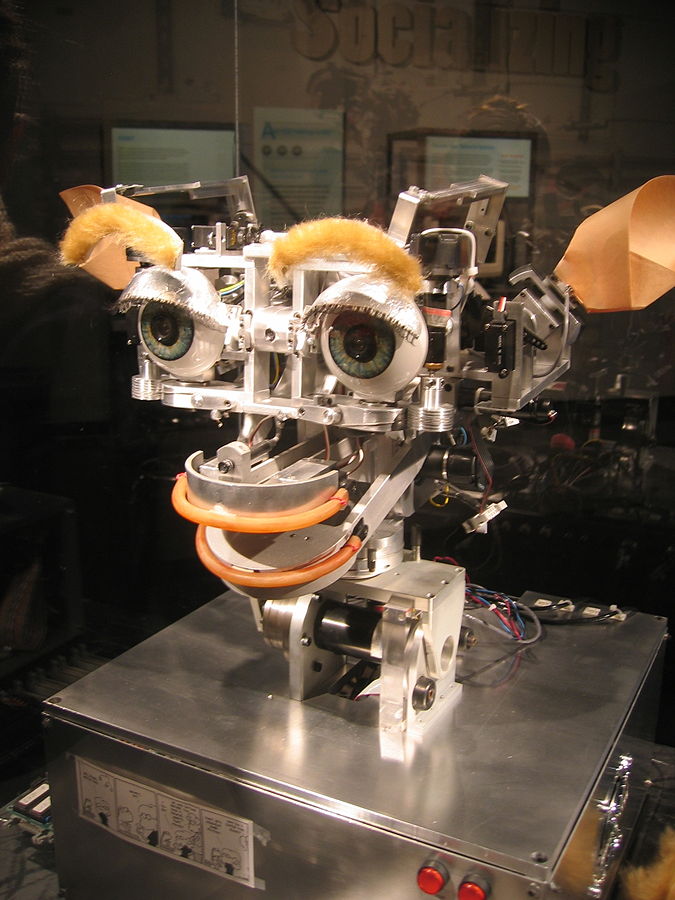

Kismet was created at MIT in the late 90s. There are a number of hobbyist robots that are derived from it. It was groundbreaking at the time, using servo motors to drive face movements intended to mimic human expressions. This has been followed in the community with OhBot, an inexpensive hobbyist kit using servo motors, which can be linked with a Raspberry Pi, using voice recognition and facial camera processing to make a convincing display.
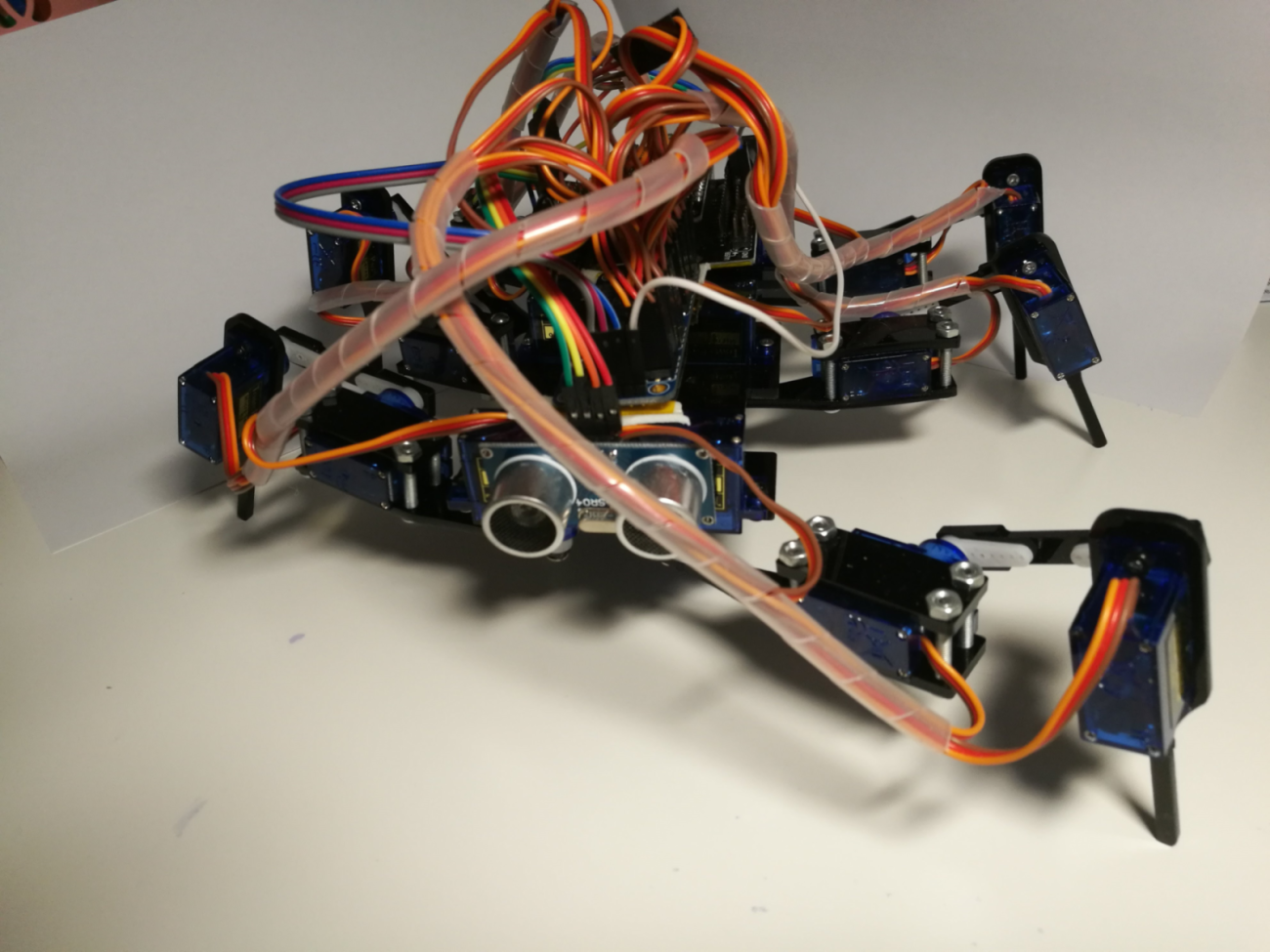
Hobby robotics is strongly linked with open source and blogging, sharing designs, and code, leading to further ideas. Hobbyist robots can be created from kits available on the internet, with modifications and additions. The kits cover a wide range of complexity from simple three-wheeled bases to drone kits and hexapods. They come with or without the electronics included. An investigation of kits will be covered in Chapter 6, Building Robot Basics - Wheels, Power, and Wiring. I used a hexapod kit to build SpiderBot to explore walking motion. Refer to the following photo:
Skittlebot was my Pi Wars 2018 entry, built using toy hacking, repurposing a remote control excavator toy into a robot platform. Pi Wars is an autonomous robotics challenge for Raspberry Pi-based robots, which has both manual and autonomous challenges. There were entries with decorative cases and interesting engineering principles. Skittlebot uses three distance sensors to avoid walls, and we will investigate this kind of sensor in Chapter 11, Programming Distance Sensors with Python. Skittlebot uses a camera to seek out colored objects, as we will see in Chapter 13, Robot Vision - Using A Pi Camera And OpenCV. Here is a photo of Skittlebot:

Some hobbyist robots are built from scratch, using 3D printing, laser cutting, vacuum forming, woodwork, CNC, and other techniques to construct the chassis and parts. Refer to the following set of photos:

I built the robot from scratch, for the London robotics group the Aurorans, in 2009. The robot was known as eeeBot in 2009, since it was intended to be driven by an Eee PC laptop. The Aurorans were a community who met to discuss robotics. The robot was later given a Raspberry Pi, and a robot arm kit seemed to fit it, earning it the name Armbot. In the current market, there are many chassis kits and a beginner will not need to measure and cut materials in this way to make a functioning robot. This was not built to compete, but to inspire other robot builders and kids to code. Towards the end of the book, we will cover some of the communities where robots are being built and shared, along with starting points on using construction techniques to build them from scratch.
The television series Robot Wars is a well known competitive robot event with impressive construction and engineering skills. There is no autonomous behavior in Robot Wars though; these are all manually driven, like remote control cars. Washing machines, although less exciting, are smarter, so they could be more strictly considered robots.
















