






















































Building a ROS-VR Android application
In this section, we will see how to create a virtual reality experience in ROS, especially in robotics simulators such as Gazebo. Luckily, we have an open source Android project called ROS Cardboard (https://github.com/cloudspace/ros_cardboard). This project is exactly what we want we want for this application. This application is based on ROS-Android APIs, which help us visualize compressed images from a ROS PC. It also does the splitting of the view for the left and right eye, and when we put this on a VR headset, it will feel like 3D.
Here is a figure that shows how this application works:
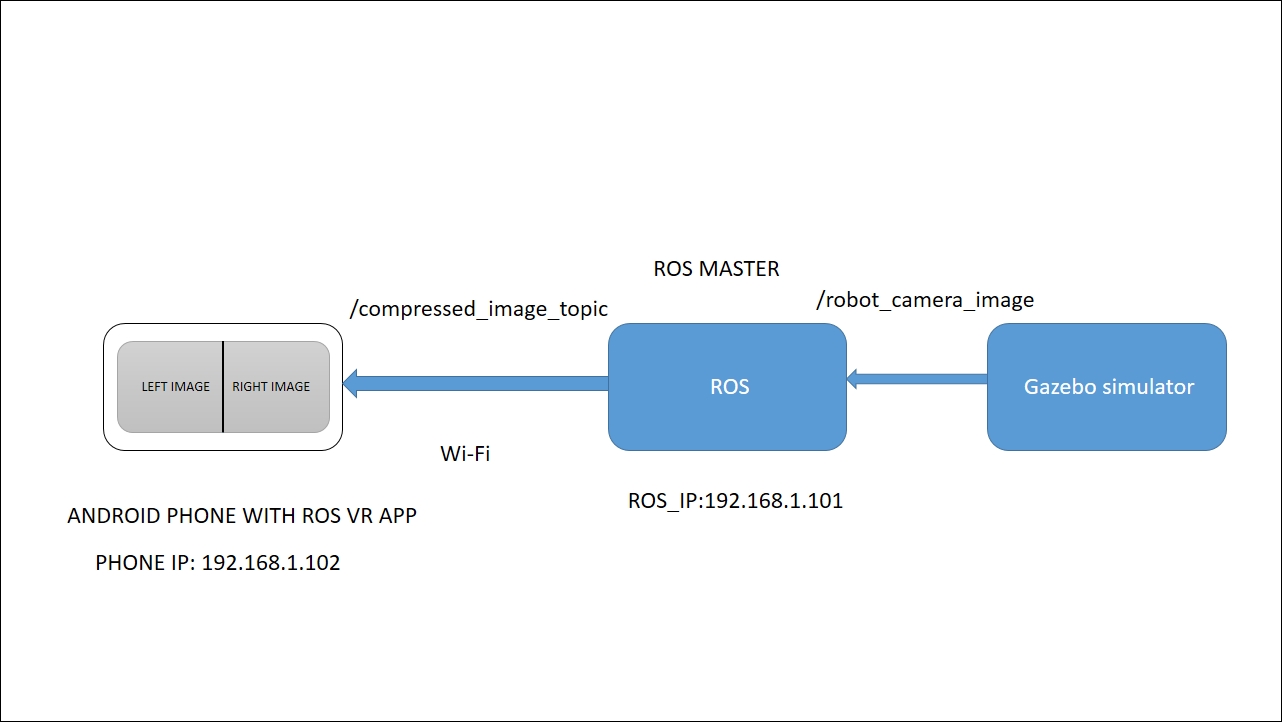
Figure 12: Communication between a ROS PC and Android phone
From the preceding figure, you can see that the image topic from Gazebo can be accessed from a ROS environment, and the compressed version of that image is sent to the ROS-VR app, which will split the view into left and right to provide 3D vision. Setting the ROS_IP variable on PC is important for the proper...







