





















































ROS parameters store the global configuration of the robot. This is a convenient way in which to define your application so that you can abstract the functionality to a high level and make it available for the end user. We are going to illustrate how ROS parameters work by using a rqt plugin that allows for dynamically reconfiguring of some of them. It is as it sounds; you can modify robot characteristics on the fly:
- Launch raspicam_node and then the rqt plugins:
T1 $ roslaunch raspicam_node camerav2_410x308_30fps.launch
T2 $ rqt_image_view
T3 $ rosrun rqt_reconfigure rqt_reconfigure
Your desktop should show the following two windows:
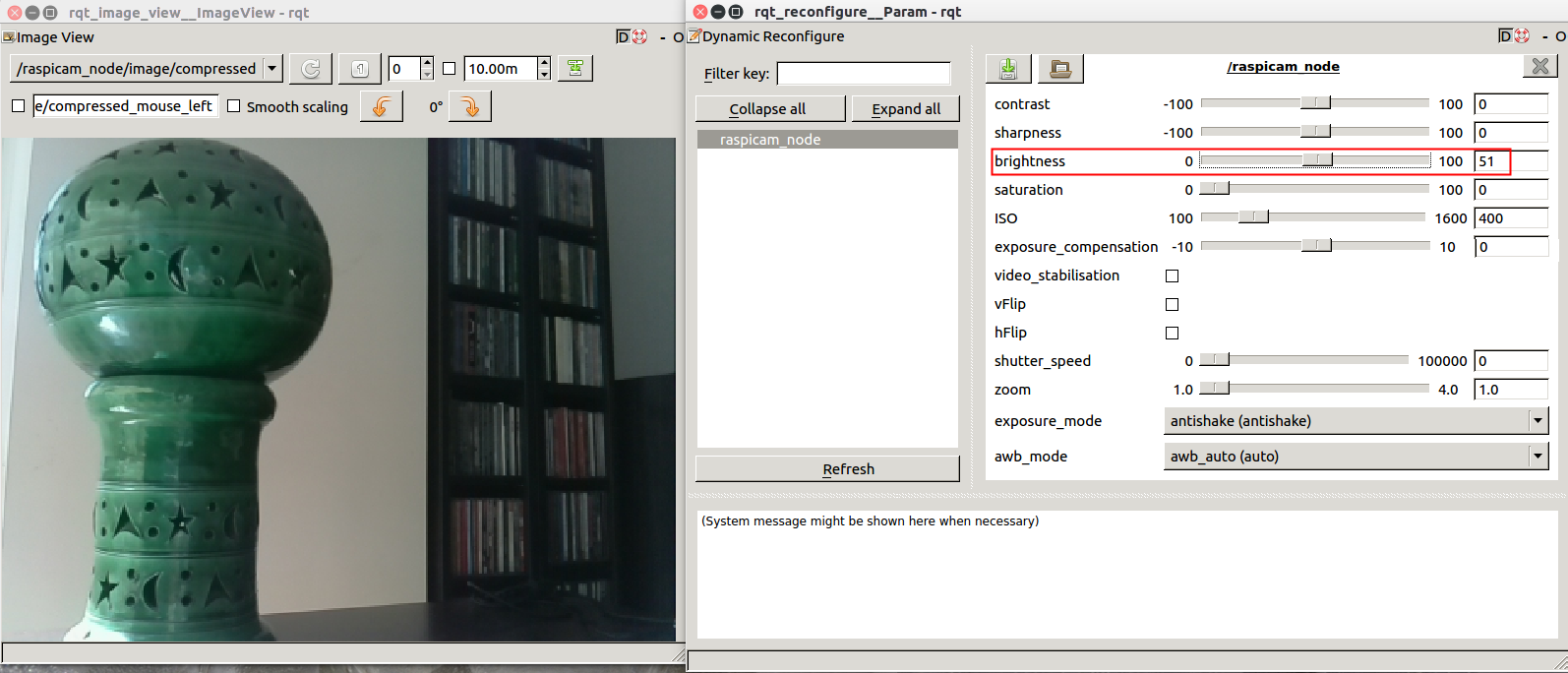
- Check the parameters on the right-hand side and focus on the brightness (the box marked in red). Modify its value from 51 to 81 and then check the result:

Wow! You can dynamically modify the configuration...












