






















































Block diagram of the robot
The robot's movement is controlled by two Direct Current (DC) gear motors with an encoder. The two motors are driven using a motor driver. The motor driver is interfaced into an embedded controller board, which will send commands to the motor driver to control the motor movements. The encoder of the motor is interfaced into the controller board for counting the number of rotations of the motor shaft. This data is the odometry data from the robot. There are ultrasonic sensors, which are interfaced into the controller board for sensing the obstacles and measuring the distance from the obstacles. There is an IMU sensor to improve odometry calculation. The embedded controller board is interfaced into a PC, which does all the high-end processing in the robot. Vision and sound sensors are interfaced into the PC and Wi-Fi is attached for remote operations.
Each block of the robot is explained in the following diagram:
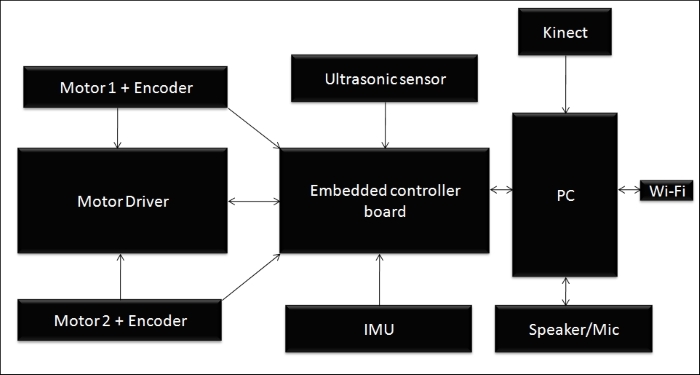
Robot Hardware block Diagram




