





















































Connecting the encoders with motors
First, remove the two DC motors from the Mini 3-Layer Round Robot Chassis Kit by disassembling it.
Now you're ready to connect the wheel encoders to the motors. Take the two neodymium magnets and two hall-effect sensors. The neodymium magnet comes with a rubber hub and allows you to press fit it over most small motors and drive shafts used in low-power gearboxes. Figure 3.3 shows a neodymium magnet connected to the drive shaft of the motor. The hall-effect sensor can be connected to the motor using a 4" zip tie. You can bend the wires to place the hall-effect sensor to face the neodymium magnet. Use about 3 mm of space between the hall-effect sensor and the neodymium magnet.
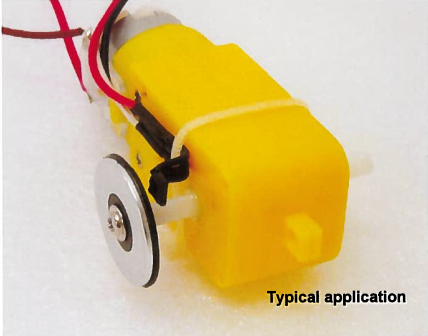
Figure 3.3: Connecting the neodymium magnet to the drive shaft. Image source—https://cdn.sparkfun.com/datasheets/Robotics/multi-chassis%20encoder001.pdf








