





















































Introducing rqt tools
The rqt tools (ROS Qt GUI toolkit) that are part of ROS allow graphical representations of ROS nodes, topics, messages, and other information. The ROS wiki lists many of the possible tools that are added to the rqt screen as plugins: http://wiki.ros.org/rqt/Plugins.
The ROS tutorial on the topics also describes some of the features of the rqt tool is at: http://wiki.ros.org/ROS/Tutorials/UnderstandingTopics.
rqt_graph
One of the common uses of rqt is to view the nodes and topics that are active. Bring the TurtleBot up with the minimal launch as previously described. Then, on the remote computer, issue the following command:
$ rqt_graph
Select the top-left box, Nodes/Topics (all). The following screenshot of rqt_graph shows the nodes that are active and the connections between the publishers and subscribers that deal with moving the base of the TurtleBot. Pass the cursor over the various items to see the nodes and topics and see how they communicate:
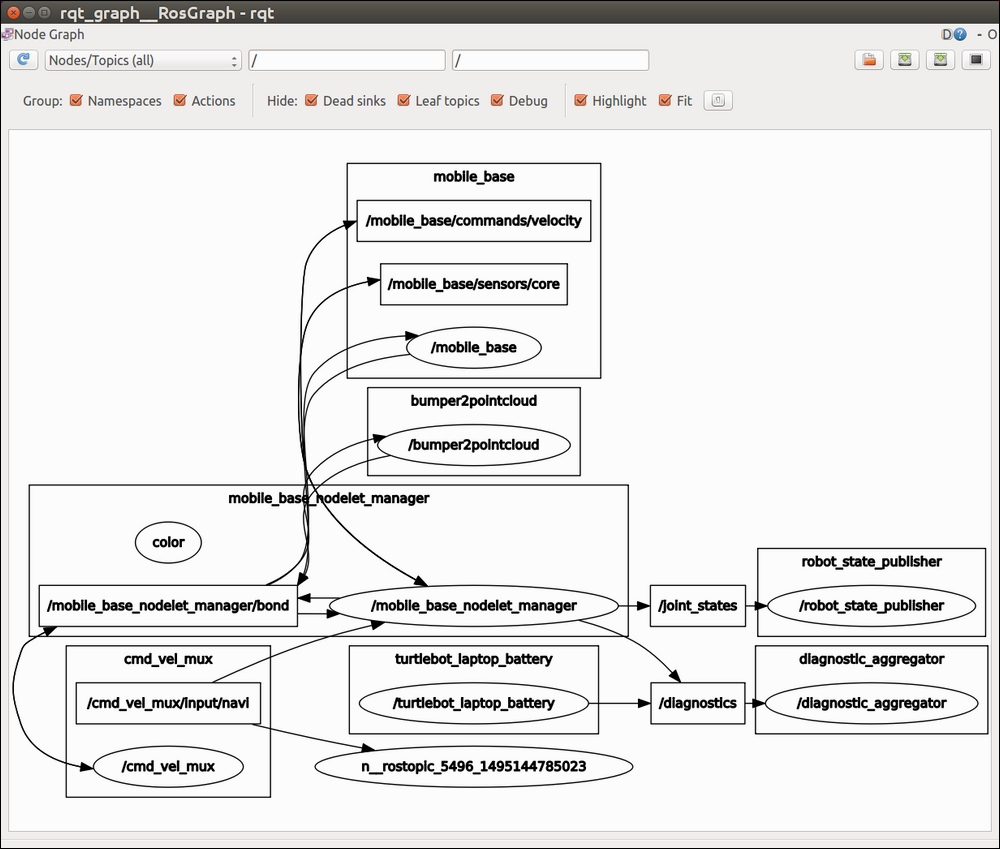
rqt_graph after minimal...











