





















































Mechanical advantage
When designing a robot, sometimes we may want to build a fast robot that needs to get to its objective quickly. At other times, we may want a powerful robot. For instance, maybe the robot needs to push a heavy object, push another robot, or climb a steep hill. When it comes to a robotic arm, we might be trying to lift a heavy object slowly or lift a small object quickly.
However, we cannot have both speed and power. There is a trade-off here—if you increase one, you decrease the other. This trade-off is called the law of conservation of energy.
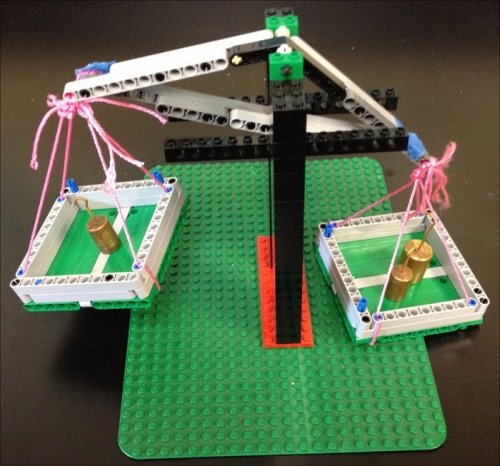
LEGO bricks allow us to use several types of simple machines. The simplest would be the lever arm. You can easily create a lever with LEGO beams and pins. To balance a seesaw or a lever, the amount of torque or rotational force must be the same on either side of the seesaw. In the preceding image, we see a LEGO balance with unequal forces but equal lever arms. The longer the lever arm, the less force we need to rotate the lever...





