Let's get to work!
You more or less have the building blocks ready for this project. Let us proceed with the rest of the project.
Problem Statement: Give yourself the robotic High-5 you deserve!
Solution: A High-5-ing robot that senses if your hand is close, and moves to High-5 you.
You have probably guessed it. We are going to use our good ol' ultrasonic proximity sensor to sense your hand.
So, the way our robot will work is as follows:
- The proximity sensor is placed in front of the servo, whose shaft is connected to a cardboard cutout of a hand via a servo horn
- When you move your hand close to the servo, it will lift the hand to give you a High-5!
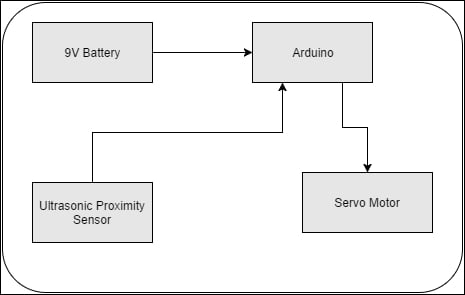
Let us put this into a diagram that will define its flow:

According to this flowchart, the proximity sensor will continuously check if an object (your hand) is close or not. When nothing is detected, the servomotor's position will keep the attached cardboard hand in the down position.
If it detects that your hand is close...