Understanding scheduling latency
Real-time threads need to be scheduled as soon as they have something to do. However, even if there are no other threads of the same or higher priority, there is always a delay from the point at which the wake-up event occurs—an interrupt or system timer—to the time that the thread starts to run. This is called scheduling latency. It can be broken down into several components, as shown in the following diagram:
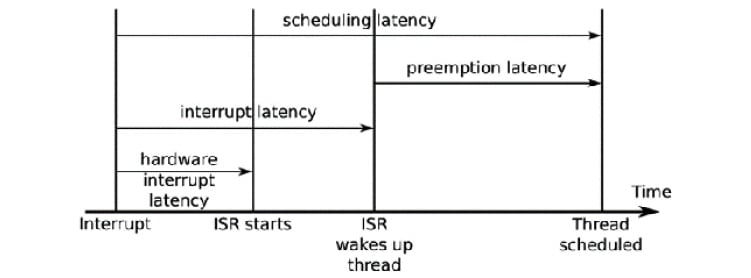
Figure 21.1 – Scheduling latency
Firstly, there is the hardware interrupt latency from the point at which an interrupt is asserted until the interrupt service routine (ISR) begins to run. A small part of this is the delay in the interrupt hardware itself, but the biggest problem is due to interrupts being disabled in software. Minimizing this IRQ off time is important.
The next is interrupt latency, which is the length of time until the ISR has serviced the interrupt and woken up any threads...