






















































After setting up ROS on a real PC, VirtualBox, or Docker, the next step is to create a workspace in ROS. The ROS workspace is a place where we keep ROS packages. In the latest ROS distribution, we use a catkin-based workspace to build and install ROS packages. The catkin system (http://wiki.ros.org/catkin) is the official build system of ROS, which helps us build the source code into a target executable or libraries inside the ROS workspace.
Building an ROS workspace is an easy task; just open a Terminal and follow these instructions:
- The first step is to create an empty workspace folder and another folder called src to store the ROS package in. The following command will do this for us. The workspace folder name here is catkin_ws:
$ mkdir -p catkin_ws/src
- Switch to the src folder and execute the catkin_init_workspace command. This command will initialize a catkin workspace in the current src folder. We can now start creating packages inside the src folder:
$ cd ~/catkin_ws/src
$ catkin_init_workspace
- After initializing the catkin workspace, we can build the packages inside the workspace using the catkin_make command. We can also build the workspace without any packages:
$ cd ~/catkin_ws/
$ catkin_make
- This will create additional folders called build and devel inside the ROS workspace:
- Once you've built the workspace, to access packages inside the workspace, we should add the workspace environment to our .bashrc file using the following command:
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
- When everything is done, you can verify that everything is correct by executing the following command:
$ echo $ROS_PACKAGE_PATH
This command will print the entire ROS package path. If your workspace path is in the output, you are done:
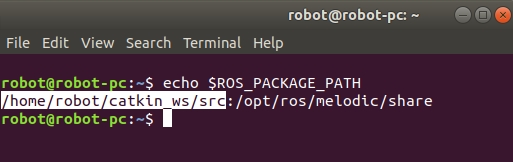
You will see that two locations are sourced as ROS_PACKAGE_PATH. The former is the recent edition we made in step 5 and the latter is the actual ROS installed packages folder. With this, we have set up the ROS workspace. We will now look at the different opportunities for ROS in industries and research.







