





















































Accessing the Kinect 360 using the Raspberry Pi
Once you have the unit connected and up and working, you can access the images. First, you'll need to install a library called freenect, which will make it very easy to access both the regular and depth images from the Kinect 360. To do this, type sudo apt-get install freenect. You'll also need a library to allow you to access freenect from Python; to get this, type sudo apt-get install python-freenect. Once you have the libraries installed, you'll also need to install a library that will allow you to access the images on the Raspberry Pi graphics system. To do this, type sudo apt-get install libgl1-mesa-swx11.
You can check to see if everything is working by opening a vncserver window and typing freenect-glview. You should see something like this:
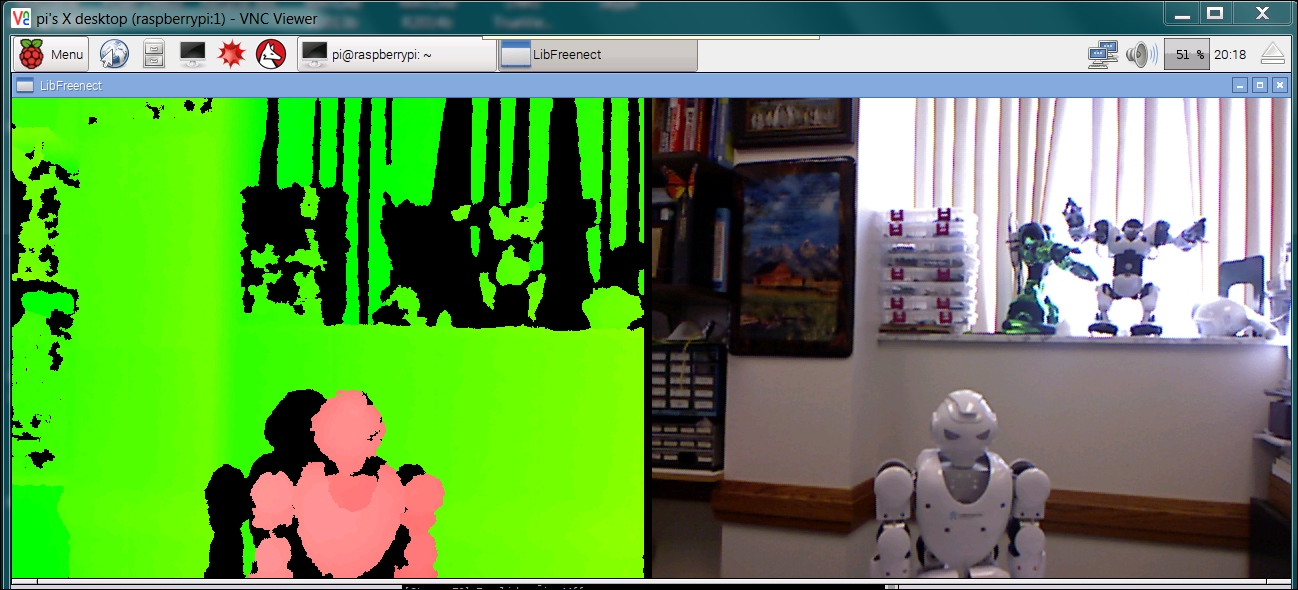
This shows both the depth and regular image. The depth image is color coded: white is closer, then red, then yellow, then green.
This is neat, but you'll want to access both images using OpenCV just...





