When high-end visual computing and computer vision applications need to be deployed in real-life scenarios, then embedded development platforms are required, which can do computationally intensive tasks efficiently. Platforms such as Raspberry Pi can use OpenCV for computer vision applications and camera-interfacing capability, but it is very slow for real-time applications. Nvidia, which specializes in GPU manufacturing, has developed modules that use GPUs for computationally intensive tasks. These modules can be used to deploy computer vision applications on embedded platforms and include Jetson TK1, Jetson TX1, and Jetson TX2.
Jetson TK1 is the preliminary board and contains 192 CUDA cores with the Nvidia Kepler GPU. Jetson TX1 is intermediate in terms of processing speed, with 256 CUDA cores with Maxwell architecture, operating at 998 MHz along with ARM CPU. Jetson TX2 is highest in terms of processing speed and price. It comprises 256 CUDA cores with Pascal architecture operating at 1,300 MHz.
This article is an excerpt taken from the book Hands-On GPU-Accelerated Computer Vision with OpenCV and CUDA. This book covers CUDA applications, threads, synchronization and memory, computer vision operations and more.
This article covers the Jetson TX1 Development Board, features and applications of the Jetson TX1 Development Board and basic requirements and steps to install JetPack on the Jetson TX1 Development Board. This article requires a good understanding of the Linux operating system (OS) and networking. It also requires any Nvidia GPU development board, such as Jetson TK1, TX1, or TX2. The JetPack installation file can be downloaded from Nvidia's official website.
Jetson TX1 is a small system on a module developed specifically for demanding embedded applications. It is Linux-based and offers super-computing performance at the level of teraflops, which can be utilized for computer vision and deep learning applications. The Jetson TX1 module is shown in the following photograph:
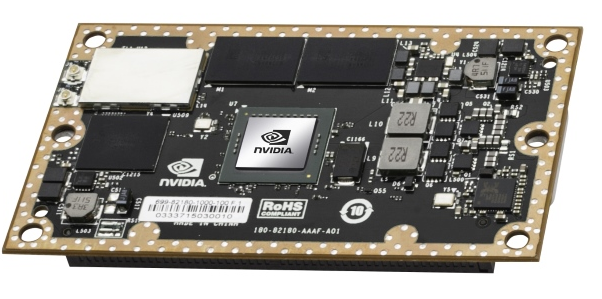
The size of the module is 50 x 87 mm, which makes it easy to integrate into any system. Nvidia also offers the Jetson TX1 Development Board, which houses this GPU for prototyping applications in a short amount of time. The whole development kit is shown in the following photograph:
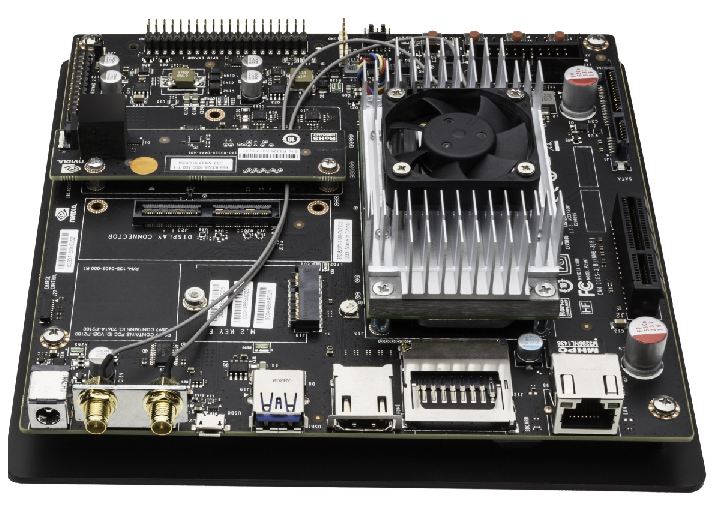
As can be seen from the photograph, apart from the GPU module, the development kit contains a camera module, USB ports, an Ethernet port, a heat sink, fan, and antennas. It is backed by a software ecosystem including JetPack, Linux for Tegra, CUDA Toolkit, cuDNN, OpenCV, and VisionWorks. This makes it ideal for developers who are doing research into deep learning and computer vision for rapid prototyping. The features of the Jetson TX1 development kit are explained in detail in the following section.
Features of the Jetson TX1
The Jetson TX1 development kit has many features that make it ideal for super-computing tasks:
- It is a system on a chip built using 20 nm technology, and comprises an ARM Cortex A57 quad-core CPU operating at 1.73 GHz and a 256 core Maxwell GPU operating at 998 Mhz.
- It has 4 GB of DDR4 memory with a data bus of 64 bits working at a speed of 1,600 MHz, which is equivalent to 25.6 GB/s.
- It contains a 5 MP MIPI CSI-2 camera module. It supports up to six two lane or three four lane cameras at 1,220 MP/s.
- The development kit also has a normal USB 3.0 type A port and micro USB port for connecting a mouse, a keyboard, and USB cameras to the board.
- It also has an Ethernet port and Wi-Fi connectivity for network connection.
- It can be connected to an HDMI display device via the HDMI port.
- The kit contains a heat sink and a fan for cooling down the GPU device at its peak performance.
- It draws as little as 1 watt of power in an idle condition, around 8-10 watts under normal load, and up to 15 watts when the module is fully utilized. It can process 258 images/second with a power dissipation of 5.7 watts, which is equivalent to the performance/watt value of 45. A normal i7 CPU processor has a performance of 242 images/second at 62.5 watts, which is equivalent to a performance/watt value of 3.88. So Jetson TX1 is 11.5 times better than an i7 processor.
Applications of Jetson TX1
Jetson TX1 can be used in many deep learning and computer vision applications that require computationally intensive tasks. Some of the areas and applications in which Jetson TX1 can be used are as follows:
- It can be used in building autonomous machines and self-driving cars for various computationally intensive tasks.
- It can be used in various computer vision applications such as object detection, classification, and segmentation. It can also be used in medical imaging for the analysis of MRI images and computed tomography (CT) images.
- It can be used to build smart video surveillance systems that can help in crime monitoring or traffic monitoring.
- It can be used in bioinformatics and computational chemistry for simulating DNA genes, sequencing, protein docking, and so on.
- It can be used in various defense equipment where fast computing is required.
Installation of JetPack on Jetson TX1
The Jetson TX1 comes with a preinstalled Linux OS. The Nvidia drivers for it should be installed when it is booted for the first time. The commands to do it are as follows:
cd ${HOME}/NVIDIA-INSTALLER
sudo ./installer.sh
When TX1 is rebooted after these two commands, the Linux OS with user interface will start. Nvidia offers a software development kit (SDK), which contains all of the software needed for building computer vision and deep learning applications, along with the target OS to flash the development board. This SDK is called JetPack. The latest JetPack contains Linux for Tegra (L4T) board support packages; TensorRT, which is used for deep learning inference in computer vision applications; the latest CUDA toolkit, cuDNN, which is a CUDA deep neural network library; VisionWorks, which is also used for computer vision and deep learning applications; and OpenCV.
All of the packages will be installed by default when you install JetPack. This section describes the procedure to install JetPack on the board. The procedure is long, tedious, and a little bit complex for a newcomer to Linux. So, just follow the steps and screenshots given in the following section carefully.
Basic requirements for installation
There are a few basic requirements for the installation of JetPack on TX1. JetPack can't be installed directly on the board, so a PC or virtual machine that runs Ubuntu 14.04 is required as a host PC. The installation is not checked with the latest version of Ubuntu, but you are free to play around with it. The Jetson TX1 board needs peripherals such as a mouse, keyboard, and monitor, which can be connected to the USB and HDMI ports. The Jetson TX1 board should be connected to the same router as the host machine via an Ethernet cable. The installation will also require a micro USB to USB cable to connect the board with a PC for transferring packages on the board via serial transfer. Note down the IP address of the board by checking the router configuration. If all requirements are satisfied, then move to the following section for the installation of JetPack.
Steps for installation
This section describes the steps to install the latest JetPack version, accompanied by screenshots. All of the steps need to be executed on the host machine, which is running Ubuntu 14.04:
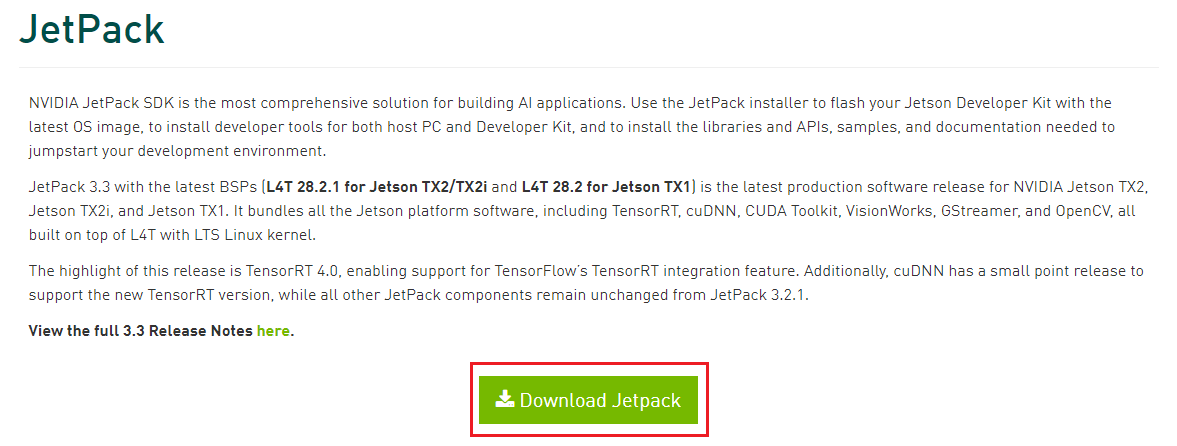
- Download the latest JetPack version from the official Nvidia site by following the link, https://developer.nvidia.com/embedded/jetpack, and clicking on the download button, as shown in the following screenshot:
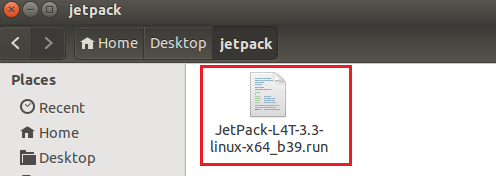
- JetPack 3.3 is used to demonstrate the installation procedure. The name of the downloaded file is JetPack-L4T-3.3-linux-x64_b39.run.
- Create a folder on Desktop named jetpack and copy this file in that folder, as shown in the following screenshot:
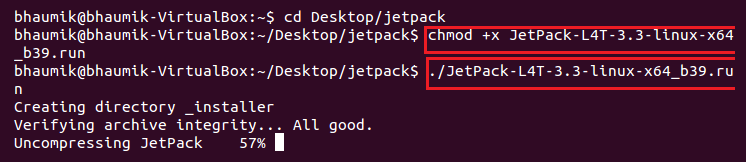
- Start a Terminal in that folder by right-clicking and selecting the Open option. The file needs to be executed, so it should have an execute permission. If that is not the case, change the permission and then start the installer, as shown in the screenshot:
- It will start an installation wizard for JetPack 3.3 as shown in the following screenshot. Just click on Next in this window:
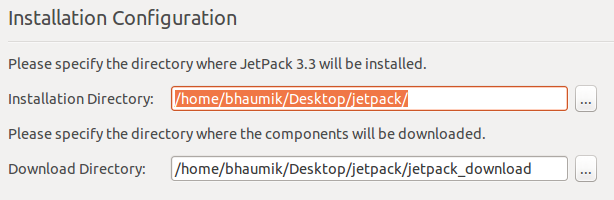
- The wizard will ask for directories where the packages will be downloaded and installed. You can choose the current directory for installation and create a new folder in this directory for saving downloaded packages, as shown in the following screenshot. Then click on Next:
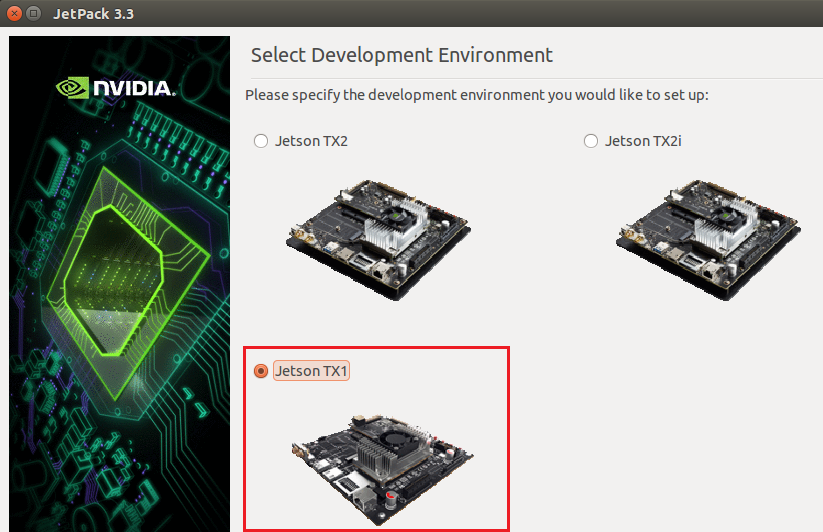
- The installation wizard will ask you to choose the development board on which the JetPack packages are to be installed. Select Jetson TX1, as shown in the following screenshot, and click on Next:
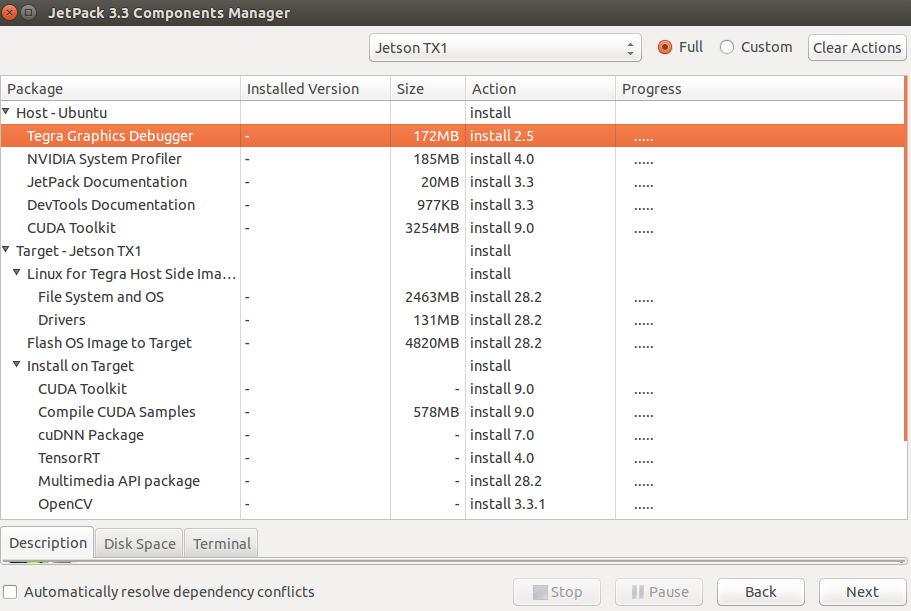
- The components manager window will be displayed, which shows which packages will be downloaded and installed. It will show packages such as CUDA Toolkit, cuDNN, OpenCV, and VisionWorks, along with the OS image, as shown in the following screenshot:
Unlock access to the largest independent learning library in Tech for FREE!
Get unlimited access to 7500+ expert-authored eBooks and video courses covering every tech area you can think of.
Renews at $19.99/month. Cancel anytime
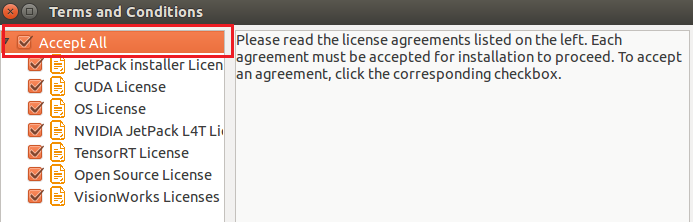
- It will ask to accept the license agreement. So click on Accept all, as shown in the following screenshot, and click on Next:
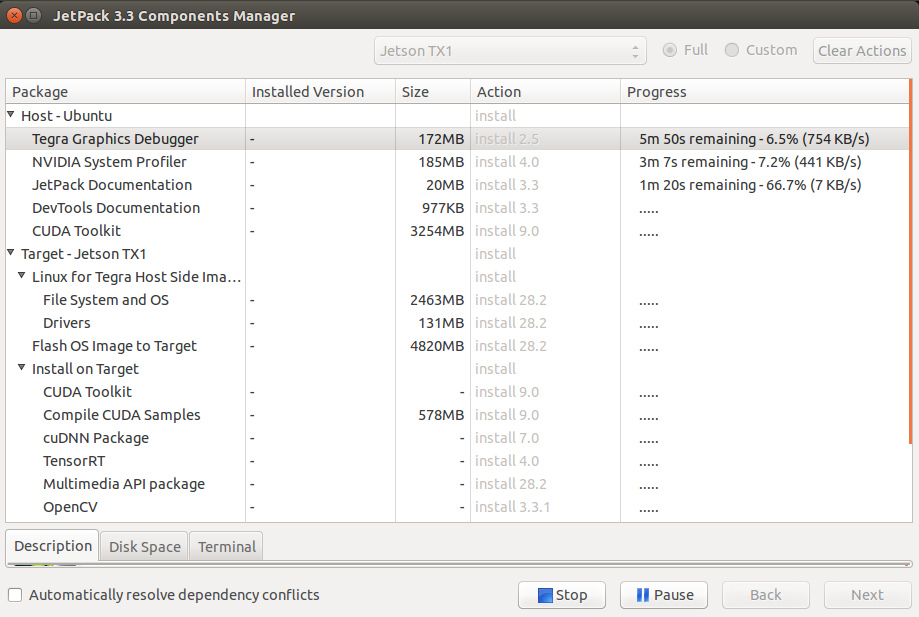
- It will start to download the packages, as shown in the following screenshot:
- When all of the packages are downloaded and installed, click on Next to complete the installation on the host. It will display the following window:
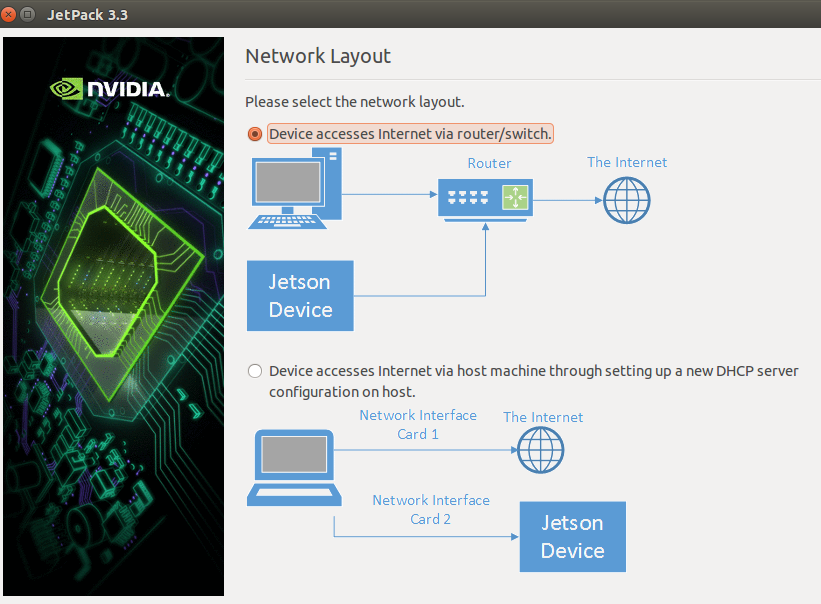
- It will ask you to select a network layout of how the board is connected to the host PC. The board and host PC are connected to the same router, so the first option, which tells the device to access the internet via the same router or switch, is selected, as shown in the following screenshot, and then click Next:
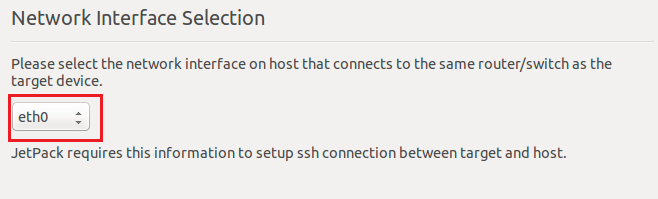
- It will ask for the interface used to connect the board to the network. We have to use an Ethernet cable to connect the router to the board, so we will select the eth0 interface, as shown in the following screenshot:
- This will finish the installation on the host and it will show the summary of the packages that will be transferred and installed on the board. When you click Next in the window, it will show you the steps to connect the board to the PC via the micro USB to USB cable and to boot the board in Force USB Recovery Mode. The window with the steps are shown as follows:
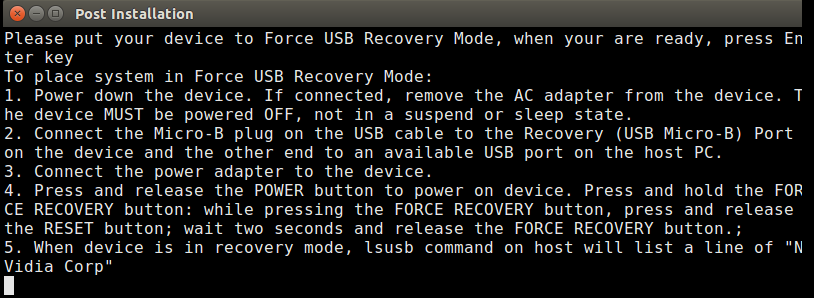
- To go into force recovery mode, after pressing the POWER button, press the FORCE RECOVERY button and, while pressing it, press and release the RESET button. Then release the FORCE RECOVERY button. The device will boot in force recovery mode.
- Type the lsusb command in the window; it will start transferring packages on to the device if it is correctly connected. If you are using a virtual machine, then you have to enable the device from the USB settings of the virtual machine. Also, select USB 3.0 controller if it's not selected. The process that starts after typing the lsusb command is shown as follows:
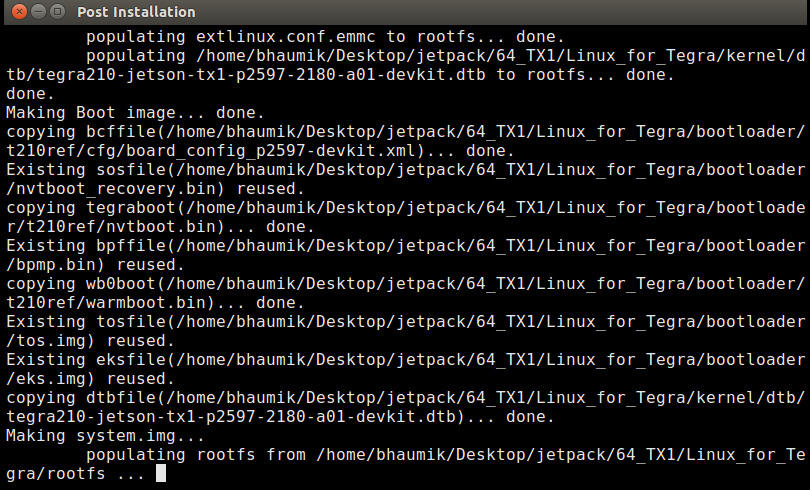
- The process will flash the OS on the device. This process can take a long time, up to an hour to complete. It will ask for resetting the device after the flashing has completed an IP address for ssh. Write down the IP address noted earlier, along with the default username and password, which is ubuntu, and click Next. The following window will be displayed after that:
- Click on Next and it will push all packages, such as CUDA Toolkit, VisionWorks, OpenCV, and Multimedia, onto the device. The following window will be displayed:

- After the process is completed, it will ask whether to delete all the downloaded packages during the process. If you want to delete, then tick on the checkbox or keep it as it is, as shown in the following screenshot:
- Click on Next and the installation process will be finished.
- Reboot the Jetson TX1 Development Board and it will boot in the normal Ubuntu OS. You will also observe sample examples of all the packages that are installed.
This article introduced the Jetson TX1 Development Board for deploying computer vision and deep learning applications on embedded platforms. It also covers features and applications of the Jetson TX1 Development Board and basic requirements and steps to install JetPack on the Jetson TX1 Development Board. To know more about Jetson TX1 and CUDA applications, check out the book Hands-On GPU-Accelerated Computer Vision with OpenCV and CUDA.
NVIDIA makes its new “brain for autonomous AI machines”, Jetson AGX Xavier Module, available for purchase
NVIDIA announces pre-orders for the Jetson Xavier Developer Kit, an AI chip for autonomous machines, at $2,499
NVIDIA launches GeForce Now’s (GFN) ‘recommended router’ program to enhance the overall performance and experience of GFN

 Germany
Germany
 Slovakia
Slovakia
 Canada
Canada
 Brazil
Brazil
 Singapore
Singapore
 Hungary
Hungary
 Philippines
Philippines
 Mexico
Mexico
 Thailand
Thailand
 Ukraine
Ukraine
 Luxembourg
Luxembourg
 Estonia
Estonia
 Lithuania
Lithuania
 Norway
Norway
 Chile
Chile
 United States
United States
 Great Britain
Great Britain
 India
India
 Spain
Spain
 South Korea
South Korea
 Ecuador
Ecuador
 Colombia
Colombia
 Taiwan
Taiwan
 Switzerland
Switzerland
 Indonesia
Indonesia
 Cyprus
Cyprus
 Denmark
Denmark
 Finland
Finland
 Poland
Poland
 Malta
Malta
 Czechia
Czechia
 New Zealand
New Zealand
 Austria
Austria
 Turkey
Turkey
 France
France
 Sweden
Sweden
 Italy
Italy
 Egypt
Egypt
 Belgium
Belgium
 Portugal
Portugal
 Slovenia
Slovenia
 Ireland
Ireland
 Romania
Romania
 Greece
Greece
 Argentina
Argentina
 Malaysia
Malaysia
 South Africa
South Africa
 Netherlands
Netherlands
 Bulgaria
Bulgaria
 Latvia
Latvia
 Australia
Australia
 Japan
Japan
 Russia
Russia










