





















































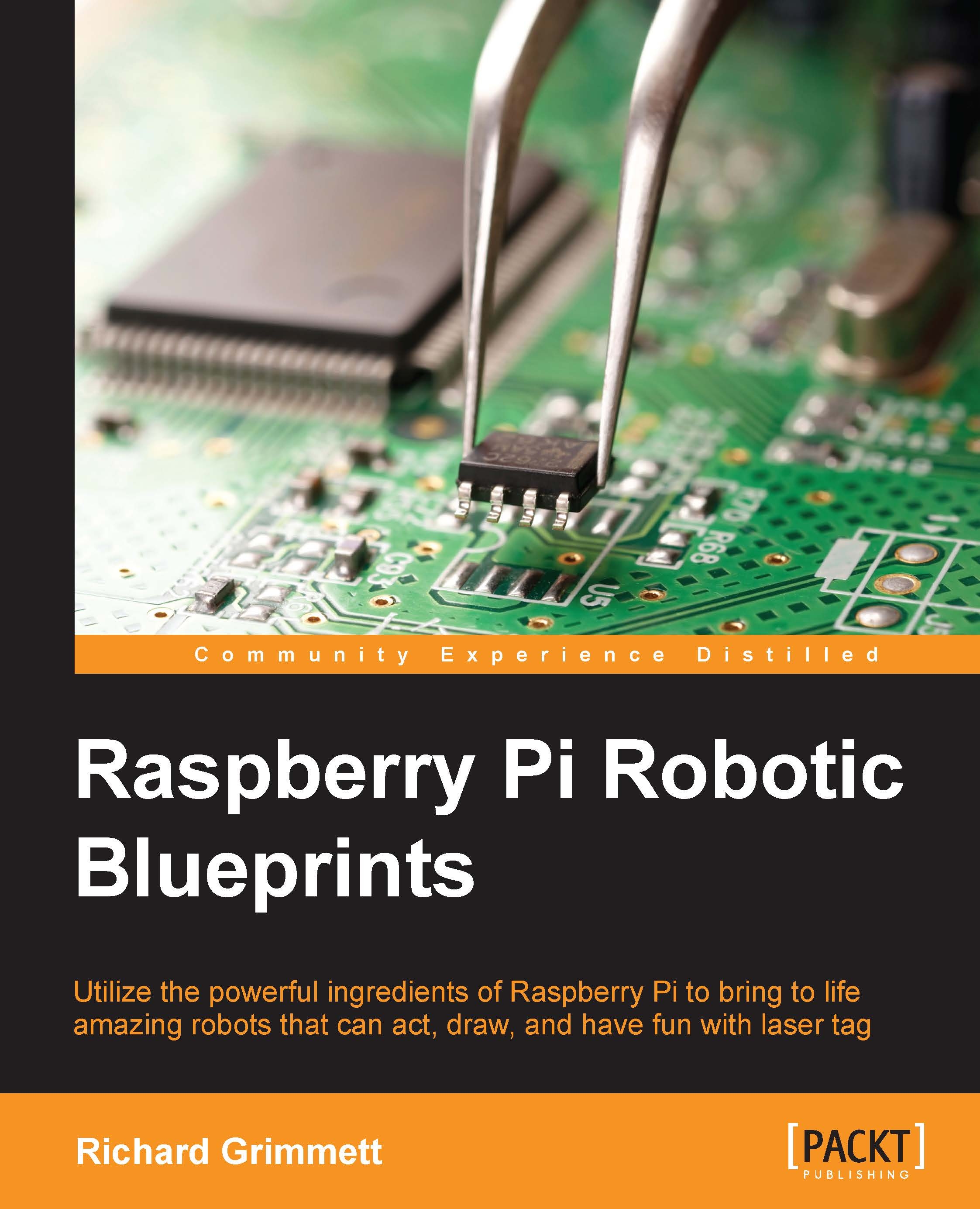
Simple drawing using the robotic arm
You can now ask your arm to hold a drawing pen by simply opening the claw, inserting a pen, and closing the claw. You'll probably want to use some sort of marker or other drawing device with a wide tip and lots of color. The following is the arm holding the pen:
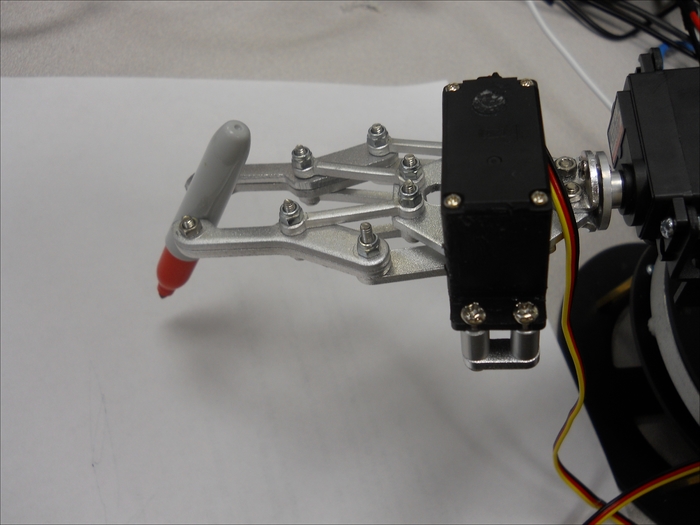
If you adjust the servo that moves the entire arm up and down, you can make the pen touch the paper, as follows:
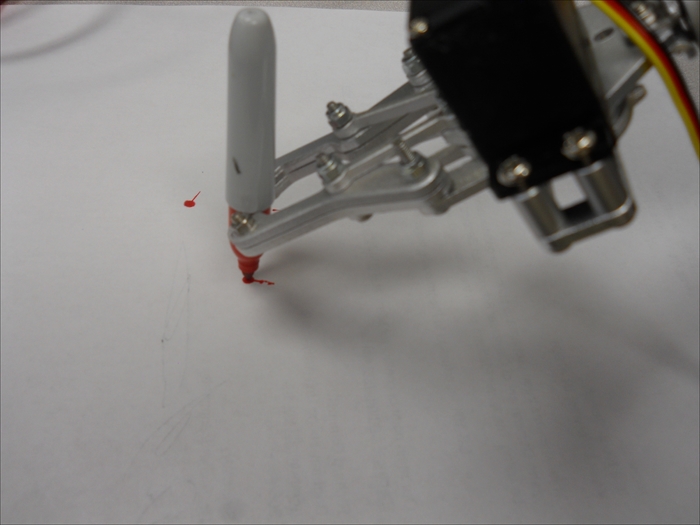
Finally, if you move the servo that turns the base, you can draw your first curved line, similar to the following image:
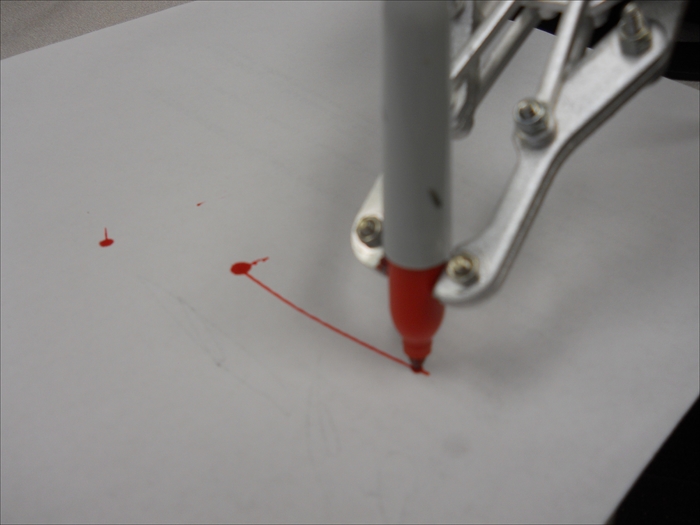
This is wonderful, but drawing only curved lines will not be particularly useful; besides, an interface where the user enters the servo locations one at a time to try and draw a more complex drawing will be unacceptable. What you need is a program that takes an x-y location input and moves the robotic arm to that point with the proper servo positions.
Since the input coming from the computer will be the x and y location for a point, you'll need to translate that value...




