Let's start with a simple example to show what kind of interesting questions we can ask our HMM models. We are taking an example of robot localization. There are a lot of variations of this example, but we are assuming that a robot is moving in a 2D grid, as shown in Figure 3.1. The robot also has four sensors on it. Each of these sensors detects whether there's a wall right next to the robot in the sensor's direction.
We would like to model the movement of the robot in the following grid along with the observations from our sensors:
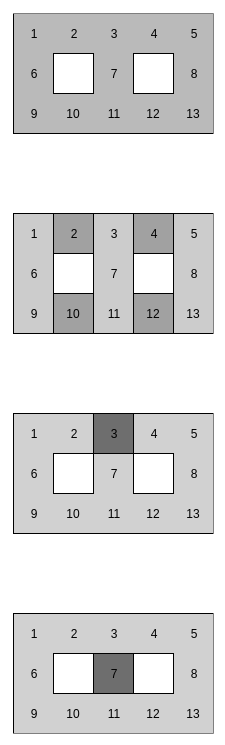
In Figure 3.1, we see how the observations at different time instances change the probability of the location of the robot in the grid. Initially, we start with a uniform probability over all the positions in the grid. Now, at time...