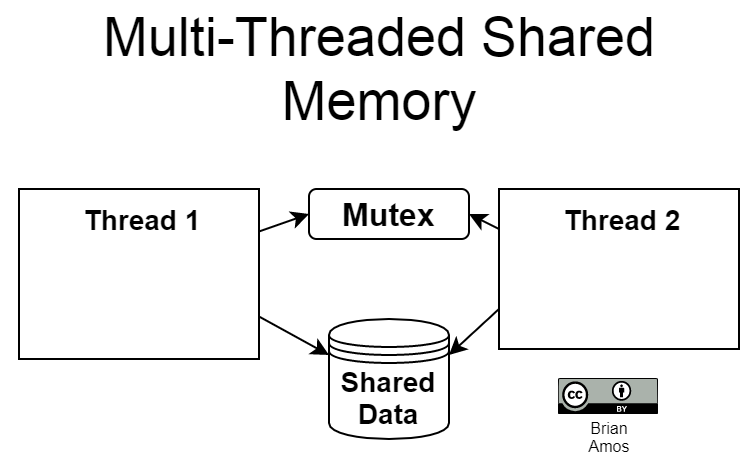
OSes (such as Windows, Linux, and macOS) were created as a way to provide a consistent programming environment that abstracted away the underlying hardware to make it easier to write and maintain computer programs. They provide the application programmer with many different primitives (such as threads and mutexes) that can be used to create more complex behavior. For example, it is possible to create a multi-threaded program that provides protected access to shared data:
The preceding application doesn't implement thread and mutex primitives, it only makes use of them. The actual implementations of threads and mutexes are handled by the OS. This has a few advantages:
- The application code is less complex.
- It is easier to understand—the same primitives are used regardless of the programmer, making it easier to understand code created by different people.
- The is better hardware portability—with the proper precautions, the code can be run on any hardware supported by the OS without modification.
In the preceding example, a mutex is used to ensure that only one thread can access the shared data at a time. In the case of a general-purpose OS, each thread will happily wait for the mutex to become available indefinitely before moving on to access the shared data. This is where RTOSes diverge from general-purpose OSes. In an RTOS, all blocking system calls are time-bound. Instead of waiting for the mutex indefinitely, an RTOS allows a maximum delay to be specified. For example, if Thread 1 attempts to acquire Mutex and still doesn't have it after 100 ms, or 1 second, it will continue waiting for the mutex to become available.
In an RTOS implementation, the maximum amount of time to wait for Mutex to become available is specified. If Thread 1 specifies that it must acquire the mutex within 100 ms and still hasn't received the mutex after 101 ms, Thread 1 will receive a notification that the mutex hasn't been acquired in time. This timeout is specified to help create a deterministic system.
Any OS that provides a deterministic way of executing a given piece of code can be considered a real-time OS. This definition of RTOS covers a fairly large number of systems.
There are a couple of characteristics that tend to differentiate one RTOS application from another: how often not meeting a real-time deadline is acceptable and the severity of not meeting a real-time deadline. The different ranges of RTOS applications are usually lumped into three categories—hard, firm, and soft real-time systems.
The severity of a failure is generally deemed safety-critical if a failure will cause the loss of life or significant property. There are hard real-time systems that have nothing to do with safety.