






















































Teleoperating using an Android phone
If it is difficult to build the previous circuit and set everything up, there is an easy way to do so with your Android phone. You can manually control either using a virtual joystick or the tilt of the phone.
Here is the Android application you can use for this:
https://play.google.com/store/apps/details?id=com.robotca.ControlApp.
The application's name is ROS Control. You can also search on Google Play Store for it.
Here is the procedure to connect your Android phone to a ROS environment:
Initially, you have to connect both your PC and Android device to a local Wi-Fi network in which each device can communicate with each other using IP addresses.
After connecting to the same network, you have to start roscore on the PC side. You can also note the IP address of the PC by entering the command ifconfig.
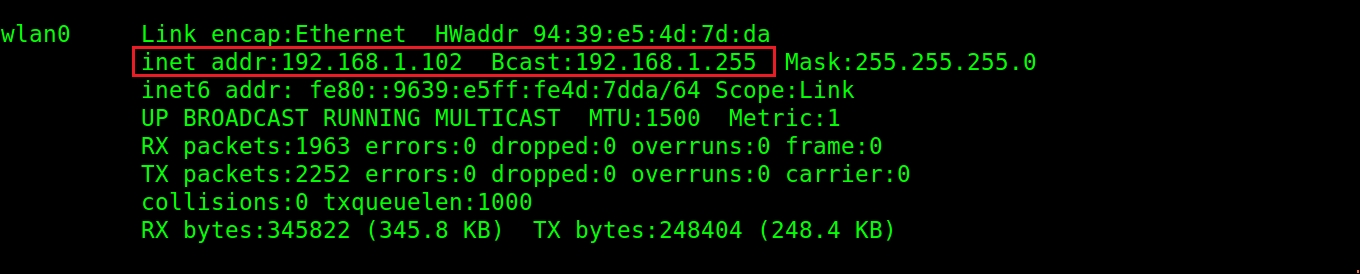
Figure 13: Retrieving the IP address of a PC with ifconfig
After obtaining the IP address of the PC, you can start the app and create a robot configuration...








