






















































There is high demand from industries that are working on commercial robotic products for ROS that runs on an embedded platform, mostly on the ARM platform. Finally, OSRF, which maintains the open source ROS, has announced its formal support for an ARM target.
Installing ROS on an ARM-based board
Getting ready
There are two streams to support ROS on an ARM target:
-
Ubuntu ARM
-
OpenEmbedded (meta-ros)
Ubuntu ARM is the most popular among researchers since it is easy to install and a lot of ARM boards are already supporting it; a few of them are shown in the following diagram. In addition, many ROS packages are already supported or could be ported with minimal changes:
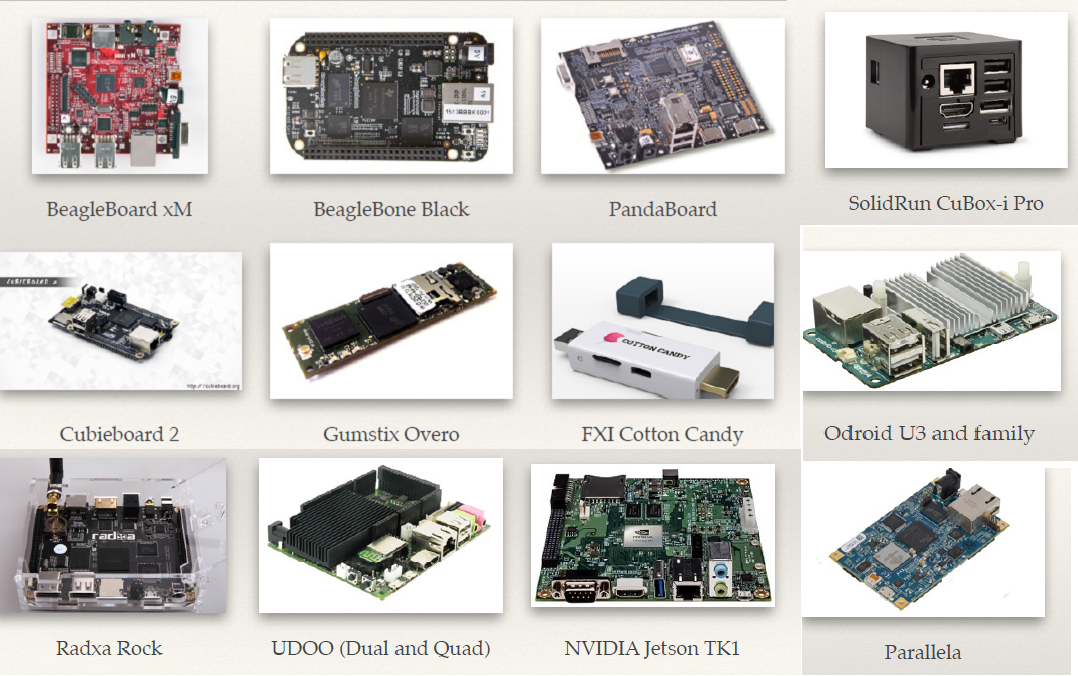
Supported platforms
However, OpenEmbedded is used by professional developers for commercial products in industries. The following table shows a comparison of both:
|
Ubuntu ARM |
OpenEmbedded |
|
Binary ROS packages |
A cross-compilation tool chain for ROS packages based on catkin |
|
Is compiled for a generic ARM architecture |
Compiles all packages from their source |
|
Installation with usual Ubuntu tools (dpkg, APT, and so on) |
Supports many architectures: ARM, MIPS, PowerPC, and more |
|
Easy and quick installation |
Easy to adjust to new machines and architectures |
|
No need to compile the basic ROS packages from source |
Allows changes to the basic ROS packages |
|
Common Ubuntu feel |
Small Linux kernels and images |
|
Additional compilation is onboard |
Requires a powerful system setup to get the build machine and tool chain running |
Despite several possibilities, we have chosen to install ROS on Ubuntu ARM because these distributions are more common and can be used on other ARM-based boards such as UDOO, ODROID-U3, ODROID-X2, or Gumstix Overo. It is recommended to use an image of Ubuntu ARM 16.04 Xenial armhf on the platform to work with ROS.
Before installing ROS on the specific ARM platform, we have to complete a few prerequisites. As this book is focused on ROS, we will list them without going into detail. However, there is a lot of information about Ubuntu ARM for specific ARM platforms available on websites, forums, and books that could be reviewed.
When we have Ubuntu ARM on our selected platform, the network interfaces must be installed to provide access to the network by configuring the network settings, such as the IP, DNS, and gateway.
An Ubuntu image for most of the ARM platform will be set up for MicroSD cards with 1-4 GB size. This is not sufficient to use a large part of the ROS Kinetic packages. In order to solve this problem, we can use SD cards with more space and expand the file system to occupy all the space available with re-partitioning:
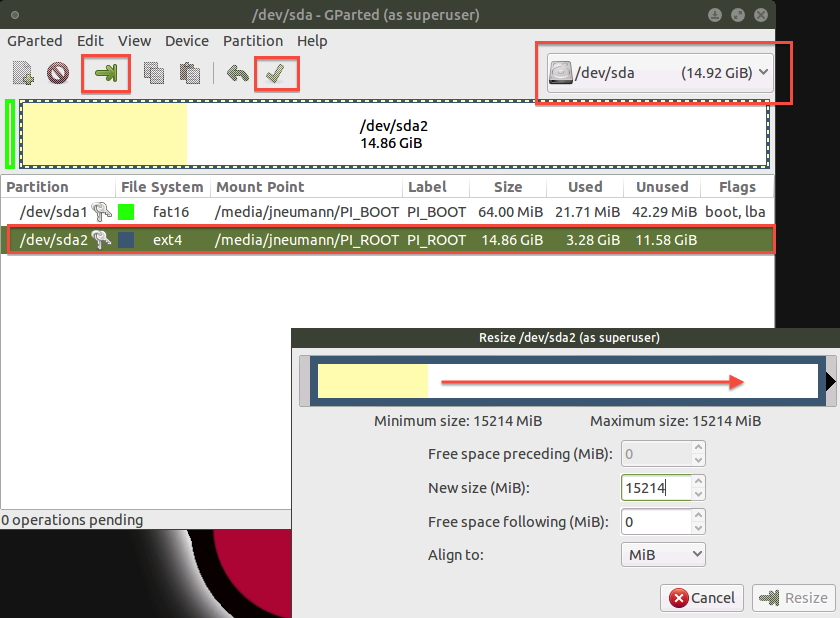
GParted
We could use the GParted utility, an open source graphical tool that is used for creating, deleting, resizing, moving, checking, and copying disk partitions and their file systems (http://gparted.org/).
How to do it...
Good! We should be ready to install ROS. After this, the process of installation is pretty similar to the desktop installation discussed in the previous section. The major difference when installing ROS on the Ubuntu ARM platform is that it will not be possible to go for the full desktop installation. We install the selected package that is required for our application. Nevertheless, it will be nice to work with source building and installation for a package not present in the ROS repository:
-
ROS Kinectic <ros_version> is compatible with Ubuntu 16.04 Xenial Xerus
-
ROS Melodic <ros_versions> is compatible with Ubuntu 18.04 Bionic Beaver
Configuring repositories
The first step consists of configuring our Ubuntu repositories to allow "restricted," "universe," and "multiverse":
$ sudo vi /etc/apt/sources.list
We have something like this for Ubuntu 16.04:
deb http://ports.ubuntu.com/ubuntu-ports/ xenial main restricted universe multiverse
#deb-src http://ports.ubuntu.com/ubuntu-ports/ xenial main restricted universe multiverse deb http://ports.ubuntu.com/ubuntu-ports/ xenial-updates main restricted universe multiverse
#deb-src http://ports.ubuntu.com/ubuntu-ports/ xenial-updates main restricted universe multiverse
#Kernel source (repos.rcn-ee.com) : https://github.com/RobertCNelson/linux-stable-rcn-ee
#
#git clone https://github.com/RobertCNelson/linux-stable-rcn-ee
#cd ./linux-stable-rcn-ee #git checkout `uname -r` -b tmp
# deb [arch=armhf] http://repos.rcn-ee.com/ubuntu/ xenial main
#deb-src [arch=armhf] http://repos.rcn-ee.com/ubuntu/ xenial main
Similarly, the following is for Ubuntu 18.04:
deb http://ports.ubuntu.com/ubuntu-ports/ bionic main restricted universe multiverse
#deb-src http://ports.ubuntu.com/ubuntu-ports/ bionic main restricted universe multiverse deb http://ports.ubuntu.com/ubuntu-ports/ bionic-updates main restricted universe multiverse
#deb-src http://ports.ubuntu.com/ubuntu-ports/ bionic-updates main restricted universe multiverse
#Kernel source (repos.rcn-ee.com) : https://github.com/RobertCNelson/linux-stable-rcn-ee
#
#git clone https://github.com/RobertCNelson/linux-stable-rcn-ee
#cd ./linux-stable-rcn-ee
#git checkout `uname -r` -b tmp
# deb [arch=armhf] http://repos.rcn-ee.com/ubuntu/ bionic main
#deb-src [arch=armhf] http://repos.rcn-ee.com/ubuntu/ bionic main
Then, use the following to update the sources:
$ sudo apt-get update
Setting system locale
Some ROS tools, such as Boost, require that the system locale be set. This can be set with the following:
$ sudo update-locale LANG=C LANGUAGE=C LC_ALL=C LC_MESSAGES=POSIX
Setting up sources.list
Next, we will configure the source lists depending on the Ubuntu version installed in our ARM platform. Run the following command to install the Ubuntu armhf repositories:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros-latest.list'
Setting up keys
As discussed previously, this step is needed to confirm that the origin of the code is correct and that no one has modified the code or programs without the knowledge of the owner:
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key 0xB01FA116








